| 产品特性:焊接 | 是否进口:否 | 产地:常州海宝 |
| 工作范围:1000-4000mm | 品牌:常州海宝 | 型号:HB400S |
| 关节数量:6 |

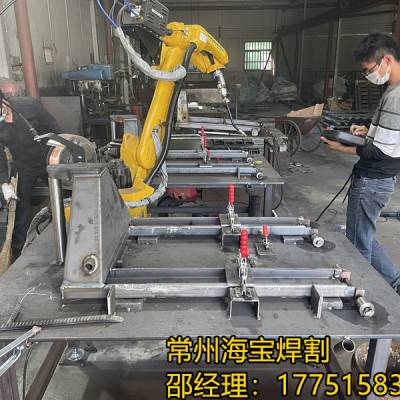
小叉车架焊接机器人系统:叉车承重架整体焊接机器人工作站焊接机器人系统说明:一、机器人:常州海宝焊接机器人发那科器人二、焊接方式:自动焊接机器人MAG三、叉车承重架焊接都采用机器人工作站完成,对产品质量的稳定性和完成客户订单量都是非常有力的保障,且在工人缩减和其他材料浪费、产品合格率等方面都非常出色。
叉车货叉架是叉车搬运体系结构中重要的承载力执行构件之一,它由横梁、立板、侧板、轴头、加强筋等多种零件焊接而成,它的焊接质量对叉车的搬运性能有着重大影响.货叉架传统焊接方法为人工焊接,因此,工人的劳动强度大,焊接中产生的弧光、粉尘等有害物质对人体造成害,焊缝质量也无法***稳定可靠.针对上述情况,结合货叉架的结构与焊缝特点,设计了货叉架双工位机器人焊接工作站,以降低工人的劳动强度,改善工作环境,提高焊接质量.
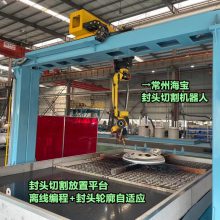
叉车门架焊接机器人工作站用于叉车内外门架的焊接过程,其主要特点如下:1。每台设备配有一套三轴焊接定位器,可使工件绕自身中心线旋转180°以内,也可使工件整体翻转,在手动焊接位置和自动焊接位置自由移动;2.每个定位器包括两个工位:机器人自动焊接和手动焊接。数控系统可以根据生产情况打开或关闭一些自动焊接程序,分配机器人和人工焊接的工作量;3.定位器工作台上的气动夹具可以适应不同宽度和长度的工件,自动夹紧锁定;4.气动夹具采用薄壁气缸,限度减少气缸占用的空间,气路上配有***旋转接头,使定位器翻转时不会缠绕气管;5.机器人的焊接部分位于挂板间,配有吸尘系统以吸收焊接烟雾。板房下挡板可以用定位器翻转,翻转不会影响吸尘效果;6.每座门式刚架的焊接时间可缩短至20-30分钟。
一、前期焊接工作站的建设
1.机器人设备的选择
首先,根据叉车车架的焊接工艺和客户的预算标准,选择ABB公司的专用弧焊机器人IRB 1520。它有六个机械手轴和紧凑的上臂结构,是专为弧焊一体化设计的。控制系统配备IRC5控制器,包含控制机械臂、附加轴和外围设备所需的电子设备。标准控制软件支持机器人系统的所有方面,如运动控制、应用程序开发和执行以及通信。
2.焊接系统的配置
在焊接工作中,焊接系统的配置非常重要。在机器人焊接工作站中,选择的焊接系统不仅要满足焊接工件的一般焊接工艺要求,还要与机器人系统相匹配。
由于客户使用松下焊接电源进行现场手动焊接,因此他们希望松下焊接电源仍将用于机器人焊接工作站。但笔者查阅了松下送丝机和焊枪的接线图,发现无法与ABB的机器人系统连接。因此建议客户选择肯比的焊接系统匹配ABB的机器人控制系统。安装在Kenby焊接电源上的DeviceNet用于机器人控制器IRC5和电源之间的通信。
3.定位器和外围设备的选择
由于叉车车架由多个工件组装而成,体积和重量都比较大,笔者放弃了用于小工件的尾架定位器,改用头尾架定位器。驱动部分选用ABB伺服电机、减速器和回转支承。这样,整个定位器的结构非常紧凑,承受的扭矩大,精度高。模拟前期选择单工位,机器人在工件装卸过程中停止工作,无法满足客户要求的生产时间。为了让机器人一直工作,提高生产时间,项目组经过讨论决定选择双工位,这样一个工件焊接完成后,机器人就可以立即焊接下一个工件。
二、焊接机器人在工程机械中的应用经验与分享
通过焊接机器人应用于内燃叉车车架焊接的案例分析,可以看出在前期搭建工作站时,机器人设备的选择并不困难。一般机器人公司都有相应的标准,但焊接系统的选择是多样化的。本项目的以下经验值得分享:
(1)选择焊接系统时,除了考虑被焊接工件的焊接工艺外,焊接系统与机器人系统之间的通信连接也非常重要,有利于***焊接质量。
(2)要提高生产效率,必须以安全为前提,所以设计方案时要以人、机、物的安全为基础。
(3)投产前必须进行调试,解决调试过程中的问题,确保焊接工件符合相关工艺要求。
(4)配置机器人系统软件时应考虑是否需要碰撞检测软件。靶心在机器人焊接系统中非常重要,建议选择此项。